Si A es una matriz de m*n y T: Rn-Rm está definida por Tx = Ax, entonces, T
es una transformación lineal. Ahora se verá que para toda transformación lineal
de Rn en Rm existe una matriz A de m*n tal que Tx = Ax
para todo x ϵ
Rn. Este hecho es de gran utilidad. Si Tx = Ax. Entonces un T = NA
e Im T = RA. más aun, v(T) = dim un T = v(A) y p(T) = dim Im T =
p(A). Así se puede determinar el núcleo, la imagen, la nulidad y el rango de
una transformación lineal de Rn-Rm determinando el espacio nulo y la imagen
de la matriz correspondiente. Adicionalmente, una vez que se sabe que Tx = Ax.
Se puede evaluar Tx para cualquier x en Rn mediante una simple
multiplicación de matrices.
Pero esto no es todo. Como se verá, cualquier
transformación lineal entre espacios vectoriales de dimensión finita se puede
representar mediante una matriz.
Teorema 1
Sea T:Rn -Rm una transformación lineal. Existe
entonces una matriz única de m*n, AT tal que

Demostración
Sea w1 = Te1,w2
= Te2,….,wn = Ten. Sea AT la matriz
cuyas columnas son w1, w2,…., wn y hagamos que
AT denote también ala transformación de Rn-Rm, que multiplica un vector en Rn
por AT. si

Entonces

De esta forma, ATei = wi
para i = 1,2,….n., T y la transformación AT son las mismas porque
coinciden en los vectores básicos.
Ahora se
puede demostrar que AT es única. Suponga que Tx = ATx y
que Tx = BTx para todo x ϵ Rn. Entonces ATx
= BTx, o estableciendo CT= AT – BT,
se tiene que CTx = 0 para todo x ϵ Rn. En particular, CTei
es la columna i de CT. Así, cada una de las n columnas de CT
es el m-vector cero, la matriz cero de m*n. Esto muestra que AT = BT
y el teorema queda demostrado.
Definición 1
Matriz de transformación
La matriz AT en el teorema 1 se
denomina matriz de transformación correspondiente a T o representación
matricial de T.
NOTA. La matriz de transformación AT
está definida usando las bases estándar tanto en Rn como en R3.
Si se utilizan otras bases, se obtendrá una matriz de transformación diferente.
TEOREMA 2
sea AT la matriz de transformación correspondiente a laa
transformación lineal T. entonces.
i.
Im
T = Im A = CAT
ii.
P(T)
= p(AT)
iii.
Un
T = NAT
iv.
v(T)
= v(AT
Ejemplo 1
Representación matricial de una transformación de proyección
Encuentre la matriz de transformación AT
correspondiente ala proyección de un vector en R3 sobre el plano xy.
Solución

Teorema 4
Sean V y W espacios vectoriales de dimensión
finita con dim V = n. sea T:V-W una transformación lineal y sea AT una
representación matricial de T respecto a las bases B1 en V y B2 en W. entonces
i.
p(T)
=p(AT) ii. V(A) = v(AT) iii. V(a) + p(T) = n
Teorema 5 Sea T:Rn-Rm una
transformación lineal. Suponga que C es la matriz de transformación de T
respecto a las bases estándar Sn y Sm en Rn y
Rm, respectivamente. Sea A1 la matriz de transición de B2 a base Sm en Rm.
Si AT denota la matriz de transformación de T respecto a las bases B1
y B2, entonces.

Geometría de las transformaciones
lineales de R2 en R2.
Sea T:R2-R2 una
transformación lineal con representación matricial AT Ahora de
demostrará que si AT es invertible, entonces T se puede escribir
como una sucesión de una o más transformaciones especiales, denominadas expansiones, compresiones, reflexiones y
cortes.
Expansiones a lo largo de los ejes x o y
Una expansión a lo largo
del eje x es una transformación lineal que multiplica a la coordenada x de un
vector en R2 por una constante C >1. Esto es


De manera similar, una
expansión a lo largo del eje y es una transformación lineal que multiplica la
coordenada y de todo vector en R2 por una constante C>1. Como antes ,
entonces
la representación matricial de T es  de
manera que
de
manera que
de
manera que
a) se
comienza con este rectángulo.
b) Expansión
en la dirección de x c = 2.
c) Expansión
en la dirección de y con c = 4.
Compresión a lo largo de los ejes
x o y.
Una compresión a lo largo de los
ejes x o y es una transformación lineal que multiplica ala coordenada x o y de
un vector en R2 por una constante positiva 0<c<1, mientras que para la
expansión c<1.
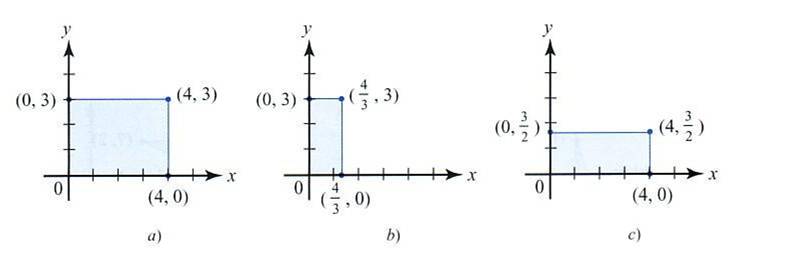
a) se
comienza con este rectángulo.
b) Compresión
a lo largo del eje x con c =1/3.
c) Compresión
a lo largo del eje x con c=1/2.
Gracias pude comprender algo :D
ResponderEliminarExcelente documento, pero no tiene bibliografía </3
ResponderEliminarSTANLEY I. Grossman. Algebra Lineal. Quinta edición. Editorial McGraw Hill
ResponderEliminar